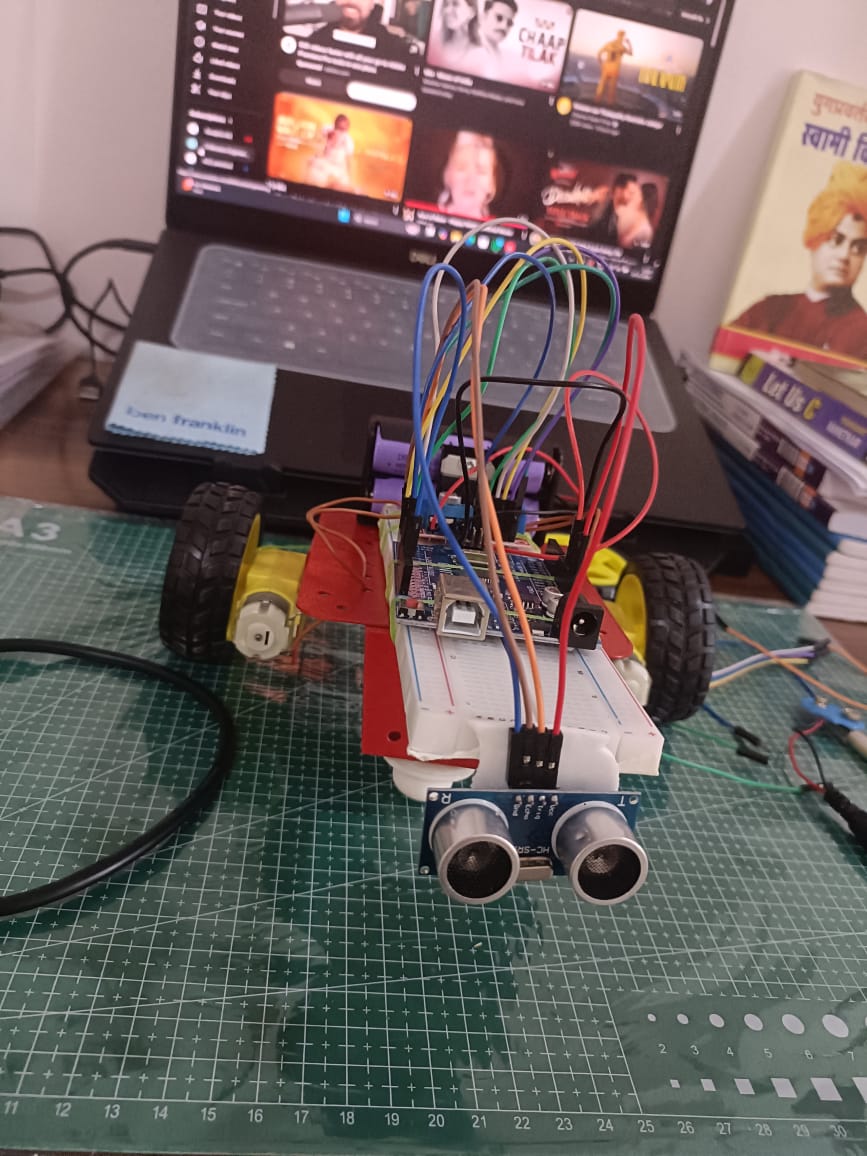
Obstacle Avoider
A 4-wheel drive autonomous robot that detects and avoids physical obstacles in real-time.
I'm Vikrant Kulkarni. I try to build autonomous robotics and IoT systems that tends to solve real-world problems.
View My Work
A 4-wheel drive autonomous robot that detects and avoids physical obstacles in real-time.
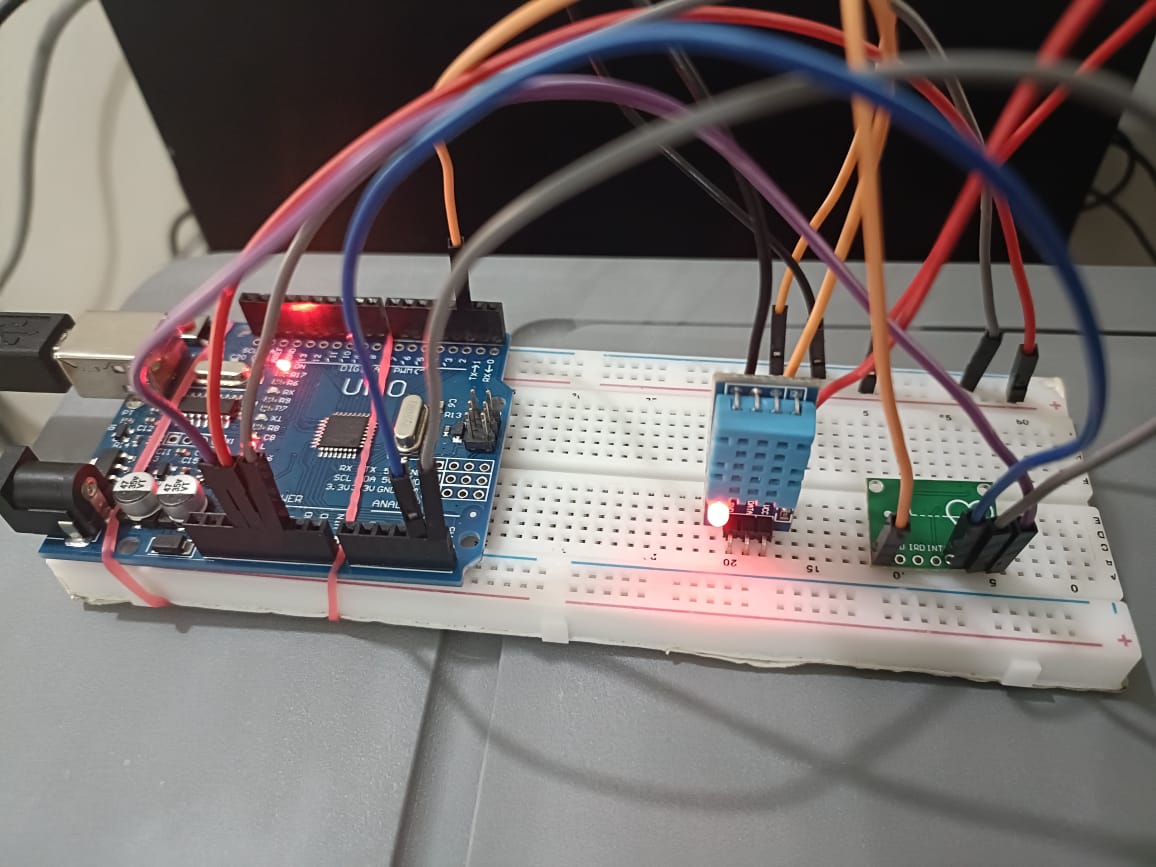
Remote patient monitoring system transmitting vital stats to the cloud for real-time analysis.

Real-time environment mapping using servo scanning and Processing IDE visualization.

Password-protected entry system with servo actuation and status feedback.
Project description goes here...